Fault isolation
Reproduce the fault, then inspect logs, bus timing, waveforms, and RTOS traces before changing code.
Engineering Profile
HKUST Computer Engineering undergraduate with a Minor in Robotics and an Extended Major in Artificial Intelligence. Experience covers MCU drivers and communication, multi-actuator control, RTOS diagnostics, shared firmware platforms, and complete robot integration.
Reproduce the fault, then inspect logs, bus timing, waveforms, and RTOS traces before changing code.
Keep drivers, communication, control, and application state machines separated by explicit interfaces.
Handle timeouts, disconnections, invalid data, recovery paths, and safety states as part of the design.
Hong Kong University of Science and Technology
BEng in Computer Engineering · Minor in Robotics · Extended Major in Artificial Intelligence · Expected 2027
Shenzhen WildNovate Technology Co., Ltd.
Sole embedded engineer · 6-axis manipulator on a swerve chassis
Integrated the arm/gimbal, swerve chassis, lift, vacuum end effectors, and a custom 6-DoF joint-mapped teleoperation controller across three STM32G4 + FreeRTOS nodes. Implemented multi-actuator scheduling, FDCAN inter-board communication, coordinate tools, and the whole-robot state machine.
Result: approximately 90% ore storage/retrieval success, no rollover during tasks, spin-to-mine capability, a 5.8s Level-4 exchange record, and selection for the RoboMaster 2025 All-Star Game.

A three-controller STM32G4 + FreeRTOS system spanning the 6-axis arm/gimbal, swerve chassis, lift, vacuum end effectors, and a custom 6-DoF joint-mapped teleoperation controller.
Implemented arm tasks, pose and coordinate tools, vacuum-state detection, pump control, and geometry validation against SolidWorks-exported URDF and MATLAB models.
Built four-module swerve control, optical-gate and steering-zero initialization, synchronized lift control, FDCAN inter-board communication, and the whole-robot command state machine.
Added gravity compensation, damping, and optional force feedback so the operator's six-joint input could map directly to arm motion while preserving controllability during continuous ore-handling tasks.
Embedded Department Leader · shared driver and middleware platform
Led approximately 10 embedded members and maintained unified interfaces for CAN/FDCAN, motor drivers, IMU, referee system, inter-board/ROS communication, control modules, and math utilities. Owned feature work, urgent fixes, PR review, and RTOS diagnostics with SystemView/Tracealyzer.
Result: the platform supported reuse across all 7 team robots; I also designed and delivered approximately 10 embedded onboarding sessions.

Unified CAN/FDCAN management, DJI/DM/LK motor drivers, IMU/AHRS, referee-system access, VTM/ROS and inter-board communication, and reusable control/math utilities.
Owned feature development, module upgrades, urgent bug fixes, interface stability, and pull-request review across infantry, hero, engineer, sentry, dart, and other robot projects.
Used SystemView and Tracealyzer for RTOS task timing and runtime diagnosis, and kept shared interfaces stable while robot teams integrated features under competition deadlines.
Delegated power-control, driver, protocol, and DSP/matrix subprojects, and structured onboarding around interfaces, motors, PID, and FreeRTOS.
Embedded control and algorithms · open source
Addressed steering zero-offset drift and abrupt target-speed changes with ChassisCalculator and speed limiting. Built 1000Hz RLS motor power identification, power/energy loops, supercapacitor management, and invalid-sample isolation for disconnected referee/capacitor data.
Result: reused across mecanum, omni, swerve, and wheel-legged chassis; all team robots completed the season with zero power-limit health deductions.
Addressed steering zero-offset drift and abrupt target-speed changes with ChassisCalculator kinematics, zero calibration, rotation limits, speed limiting, and a lazy steering strategy.
Ran recursive least squares at 1000Hz to identify motor power parameters continuously, then allocated available power from speed error and predicted consumption before solving the allowable torque.
Adjusted the power ceiling through referee-buffer and supercapacitor energy feedback, while isolating invalid samples when referee or capacitor data disconnected.
The framework was reused on mecanum, omni, swerve, and wheel-legged platforms. Every team robot completed the season without power-limit health deductions, and the project was released publicly.

Independent whole-robot embedded development
Whole-robot firmware for mecanum chassis, gimbal, shooter, loading, jam/heat handling, vision, and inter-board communication.
Implemented 2-axis gimbal control, friction-wheel and loading mechanisms, heat limits, jam recovery, launch state machines, vision communication, and runtime monitoring.
Built mecanum motion control with follow, spin, and free modes; integrated supercapacitor/power control and gimbal–chassis command communication on STM32F407/G4 + FreeRTOS.
Embedded development · two robot generations
Two generations of launch control with target selection, friction wheels, loading/reset, launch-window logic, and referee integration.
Controlled 4 × M3508 friction-wheel motors, loading, reloading, and yaw axes on STM32F427; supported manual debugging, reset, and automatic launch modes.
Used remaining-time, gate-state, target-health, and launch-command data from the referee system to choose outpost/base targets and determine launch timing; used limits and current sensing for mechanism state.
Contract project · embedded systems and algorithms
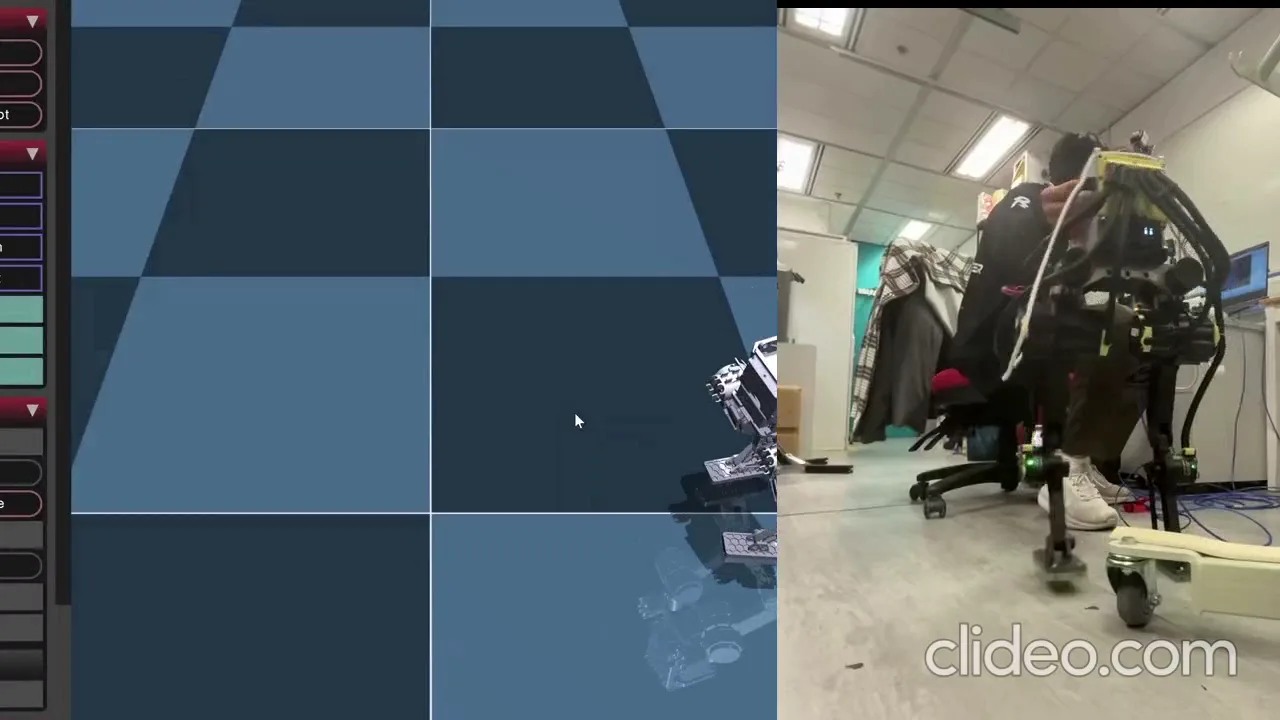
Isaac Lab and MuJoCo training/validation pipeline, PPO tooling, and STM32G4 communication for 10 joint motors and IMU state.
Built an Isaac Lab direct task, MuJoCo sim-to-sim evaluation, custom RSL-RL / PPO Actor-Critic training, policy play/export tools, and perturbation/domain-randomization tests.
Used STM32G4 to collect IMU and 10-joint motor state, report observations and receive actions over ROS/UART, then control DM/RoboStride motors during hardware integration.
Contract project · embedded product prototype
STM32H723 product prototype with speed control, yaw/pitch aiming, launch/retract state machines, remote trigger, limits, and three-week delivery.
Developed the STM32H723 controller with dual M3508 closed-loop friction wheels, yaw/pitch servos for landing-point adjustment, and launch/retract state machines.
Added remote triggering, multiple speed levels, gimbal limits, and wheel-ready checks before launch; completed the path from control proposal to working prototype in a three-week delivery.
Course project · embedded control and algorithms
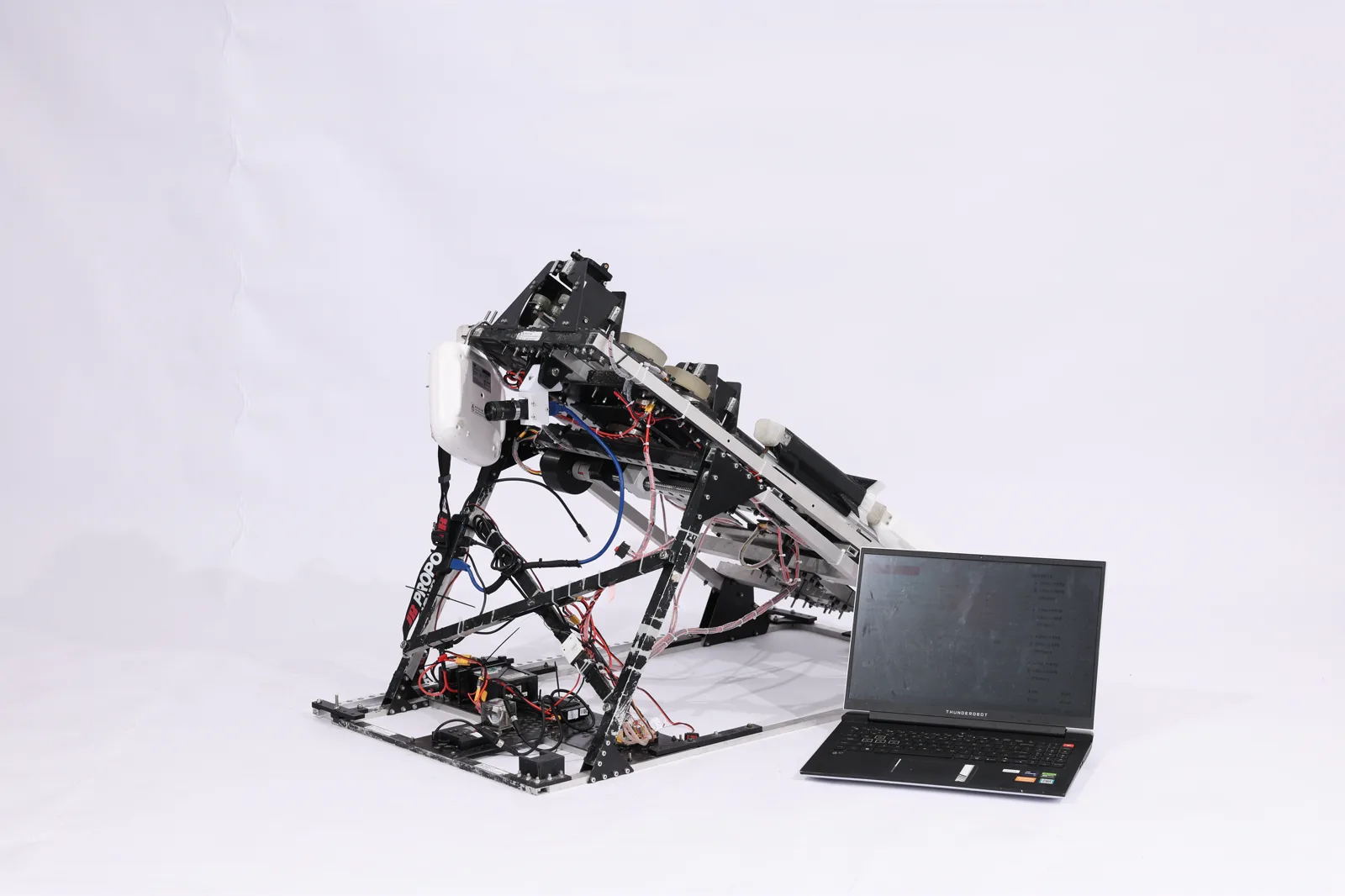
Completed proposal, simulation and prototype validation, component selection, forward development, integration, stability verification, and the final demo in just over one month. Integrated four J4340 joints and a wrist IMU with DH, Jacobian, and RNEA models for real-time torque control.
Result: delivered the complete course demo on schedule with gravity/inertia compensation and endpoint virtual-force mapping.

Built DH-chain, Jacobian, and RNEA inverse-dynamics models to update joint state, compensate gravity/inertia, and map endpoint virtual force through JᵀF into joint torque.
Integrated four J4340 joints and a wrist IMU on STM32H750 + FreeRTOS, estimated human motion tendency from pose and acceleration, and issued combined torque through MIT mode.
Used MuJoCo, MATLAB models, and friction-fitting scripts to validate the control chain before integration, then delivered the complete working course demo on schedule.
Most RoboMaster, contract, and course repositories are private; public code and media links are marked on the relevant projects.
Embedded Department Leader and Engineer Robot embedded lead. Planned tasks, reviewed code, maintained RM2025-Core, and integrated the complete Engineer Robot.
Outcome: Zhejiang Regional champion and Revival Tournament Second Prize.
Responsible for pre-match inspection, on-site debugging, parameter adjustment, and stability of the Engineer Robot's manipulator, chassis, lift, vacuum system, and teleoperation controller.
Learning: make fast, observable, and reversible engineering decisions under field pressure.
Developed the Hero Robot and later two generations of Dart launch control; also contributed to swerve-drive research and adaptive chassis power control.
Outcome: Guangdong Regional First Prize, Revival Tournament Second Prize, and zero team-wide power-limit health deductions.
Led approximately 10 members, handled design and PR reviews, urgent fixes, shared interfaces, and subprojects in power control, motor drivers, serial protocols, and DSP/matrix tooling.
Outcome: established a shared embedded platform and a repeatable onboarding workflow across robot projects.